002.发布订阅模式及其实现
1. ROS的主要通讯方式: Topic话题与Message消息
1.1 为什么需要通讯?
比如超声波传感器(chao_node)和马达(ma_node), 他们之间需要信息交流才可以共同完成任务.
1.2 Topic话题与Message消息
类比 redis/mq 的发布订阅者模式, 即可, 略
1.3 小结
- 话题Topic是节点间进行持续通讯的一种形式。
- 话题通讯的两个节点通过话题的名称建立起话题通讯连接。
- 话题中通讯的数据,叫做消息Message。
- 消息Message通常会按照一定的频率持续不断的发送,以保证消息数据的实时性。
- 消息的发送方叫做话题的发布者Publisher。
- 消息的接收方叫做话题的订阅者Subsciber。
外延补充
- 一个ROS节点网络中,可以同时存在多个话题
- 一个话题可以有多个发布者,也可以有多个订阅者。
- 一个节点可以对多个话题进行订阅,也可以发布多个话题
- 不同的传感器消息通常会拥有各自独立话题名称,每个话题只有一个发布者。
1.4 std_msgs
不同的node之间交流的消息不同, 就需要定义不同的格式, 为了统一格式, 故有std_msgs(标准消息库), 其中定义了一些格式
从 https://index.ros.org/p/std_msgs/github-ros-std_msgs/#noetic-overview
到 https://wiki.ros.org/std_msgs
可以看到消息API http://docs.ros.org/en/noetic/api/std_msgs/html/index-msg.html
2. C++编写Publisher发布者节点
2.1 代码
#include <ros/ros.h>
#include <std_msgs/String.h>
int main(int argc, char *argv[]) {
ros::init(argc, argv, "chao_node");
printf("Hello 世界!\n");
ros::NodeHandle nh; // 节点句柄
// 创建一个主题, 消息包类型为 std_msgs::String, 名称为`HX_Home`,
// 缓存队列长度为 16 (如果队列滞留的消息 > 缓存队列长度, 那么将pop队尾元素)
ros::Publisher pub = nh.advertise<std_msgs::String>("HX_Home", 16);
ros::Rate loop_rete(10); // 控制循环每秒执行的次数 (此处每秒执行10次)
int i = 0;
while (ros::ok()) {
printf("输出 %d\n", ++i);
std_msgs::String msg;
msg.data = "你好啊, 我是 " + std::to_string(i);
pub.publish(msg); // 发送消息
loop_rete.sleep(); // 控制循环执行频率
}
return 0;
}
测试, 查看消息:
loli@HengXin-ROG-PRIME:~$ rostopic echo /HX_Home
data: "\u4F60\u597D\u554A, \u6211\u662F 19"
---
data: "\u4F60\u597D\u554A, \u6211\u662F 20"
---
# 使用 echo 解码
loli@HengXin-ROG-PRIME:~$ echo -e data: "\u4F60\u597D\u554A, \u6211\u662F 19"
data: 你好啊, 我是 19
2.2 常用工具
- 列出当前系统中所有活跃着的话题
rostopic list
- 显示指定话题中发送的消息包内容
rostopic echo <主题名称>
- 统计指定话题中消息包发送频率
rostopic hz <主题名称>
3. C++编写Subscriber订阅者节点
3.1 代码
#include <ros/ros.h>
#include <std_msgs/String.h>
void hx_home_cb(const std_msgs::String& msg) {
ROS_INFO(msg.data.c_str());
}
int main(int argc, char *argv[]) {
// 设置编码, 不然 ROS_INFO 可能会是乱码, 设置 "" 则使用本地默认编码
setlocale(LC_ALL, ""); // zh_CN.UTF-8
ros::init(argc, argv, "ma_node"); // 注意, 节点名称不能和上面的相同啊!
printf("等待接收!\n");
ros::NodeHandle nh; // 节点句柄
// 订阅一个主题, 名称为`HX_Home`,
// 缓存队列长度为 16 (如果队列滞留的消息 > 缓存队列长度, 那么将pop队尾元素)
// 如果有消息, 则交给回调函数`hx_home_cb`处理
ros::Subscriber pub = nh.subscribe("HX_Home", 16, hx_home_cb);
while (ros::ok()) {
ros::spinOnce(); // 需要这个
}
return 0;
}
ros::spinOnce()的处理流程:
- 简单地说: 会调用 此时, 所有订阅的主题的所有缓存队列的消息到回调
- 而不是只调用其中一个消息的一个回调函数的一次
可以用这个感受一下
ros::Rate loop_rete(1);
while (ros::ok()) {
ros::spinOnce();
loop_rete.sleep();
}
注: 区分一下此处和前面的缓存队列长度
| ##container## |
|---|
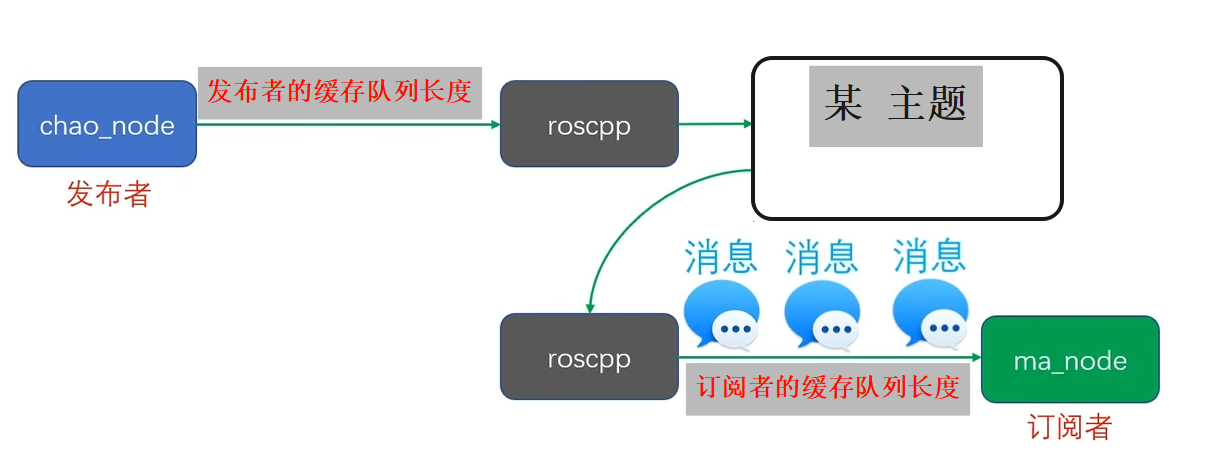 |
是两个独立的东西
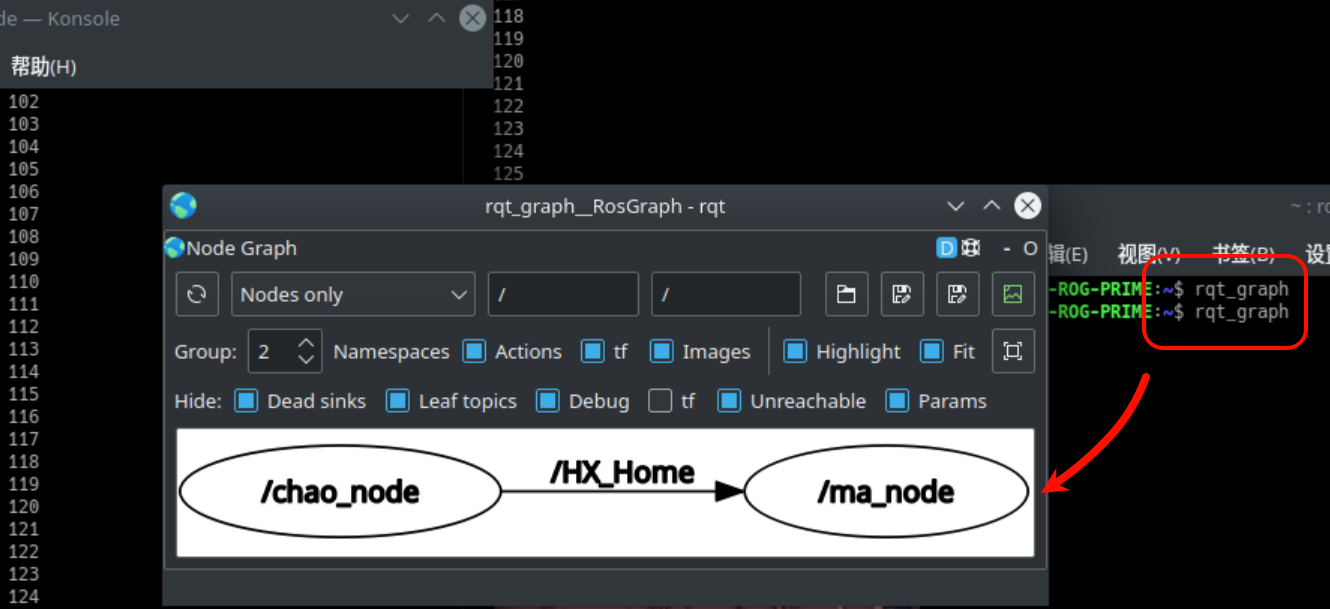
3.2 GUI工具: 查看通讯网络
-
启动程序, 让他们交流
-
控制台输入
rqt-graph
| ##container## |
|---|
 |
4. 话题是谁的话题
-
我们知道, 如果发布者发布话题, 那么是可以
rostopic list看到的 -
但实际上, 没有发布者, 只有订阅者, 也是可以
rostopic list看到话题的 -
故, 话题的生命周期实际上是由ros管理的

